Bạn là một kỹ sư và muốn lập team gồm toàn những kỹ sư xuất sắc để chế tạo một con robot có khả năng tương tác với con người. Đáng tiếc, nếu chỉ có kiến thức về chế tạo máy móc, bạn gần như không thể chế tạo ra được con robot mà bạn muốn[1].
Bản thân thuật ngữ tương tác người-robot (human-robot interaction) đã cho thấy rằng bạn phải hiểu về con người và cách con người tương tác với một người hoặc một vật thể hay thiết bị nào đó. Kiến thức này gần như không hề có trong các chương trình đào tạo các ngành kỹ thuật. Bạn cần phải tự trang bị thêm những kiến thức này hoặc tốt hơn là hợp tác với những chuyên gia về tâm lý học, nghiên cứu xã hội, hoặc các ngành nhân văn.
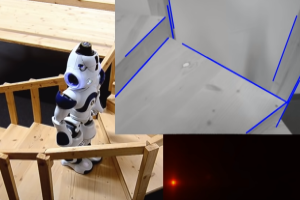
Robot thông thường chỉ tương tác với thế giới xung quanh thông qua những quy luật vật lý. Trong môi trường có con người, robot cần phải nhận biết nhiều thứ hơn và bị chi phối bởi những quy luật và đạo đức xã hội. Những quy luật này nhiều lúc trừu tượng và phức tạp ngay cả đối với con người.
Robot không đơn giản là máy tính được gắn thêm bánh xe hoặc chân tay để chuyển động. Một sai lầm phổ biến là gắn chatbot vào một bộ khung robot nào đó mà không được đồng bộ với nhau tạo nên cảm giác “lạ lùng” hay “hồn Trương Ba, da hàng thịt”. Phần cứng và phần mềm của robot cần phải được đồng bộ với nhau trên cơ sở con người tương tác và giao tiếp với robot đó như thế nào. Các yêu tố như đối tượng giao tiếp, môi trường giao tiếp, phương thức giao tiếp và lĩnh vực mà robot được ứng dụng phải được xem xét khi thiết kế hình dáng và hành vi của robot.
Thiết kế hình dáng
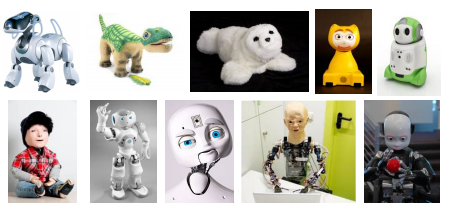
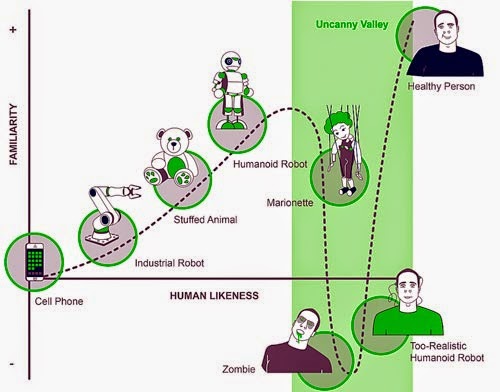
Con người có xu hướng áp dụng cách con người tương tác với nhau vào quá trình tương tác với thiết bị bao gồm robot. Robot được thiết kế càng giống người đến chừng nào thì con người càng áp dụng cách tương tác giữa người với người khi tương tác với robot nhiều chừng đó. Người ta kỳ vọng robot có những chức năng dựa vào những bộ phận của robot (tay có thể cầm nắm, tai có thể nghe, miệng có thể nói). Trong đa số các trường hợp như vậy, robot thường không có đầy đủ các chức năng giống con người về giác quan, cử chỉ, hành vi và lời nói. Điều này làm cho người tương tác thất vọng và ảnh hưởng đến hiệu quả tương tác. Nhiều trường hợp còn dẫn đến cảm giác ghê sợ - hiện tượng thung lũng kỳ lạ (uncanny valley).
Do đó khi thiết kế, hình dạng robot phải phù hợp với chức năng để tránh hiện tượng kỳ vọng thái quá. Mức độ giống người (anthropomorphism) cũng phải được cân nhắc kỹ để tránh hiện tượng thung lũng kỳ lạ. Ví dụ: robot lau nhà không cần phải có tay chân, không nên chế tạo robot có tay chân nhưng không cầm nắm được đồ vật hoặc đi lại được.
Thiết kế hành vi
Có nhiều lý thuyết thiết kế hành vi cho robot. Đa phần trong số đó là các mô hình lấy ý tưởng từ hành vi của con người đã được ngành khoa học tâm lý và khoa học hành vi nghiên cứu. Mô hình phổ biến nhất là mô hình hành vi nhiều lớp (multi-layer behavior model). Sau đây là ba lớp hành vi chính thường được sử dụng.
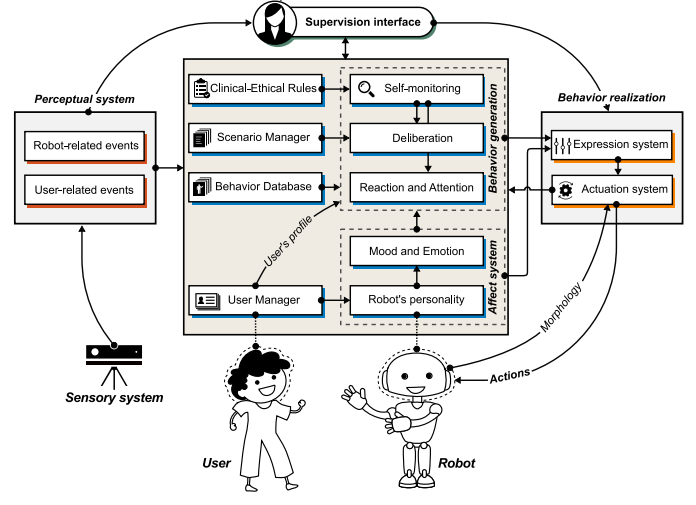
Lớp hành vi phản xạ
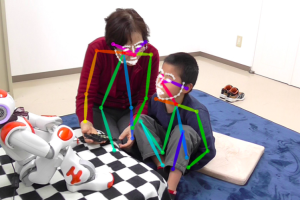
Lớp này bao gồm những hành vi vô thức và một số hành vi phi ngôn ngữ. Các hành vi vô thức như chớp mắt, cử động vi mô của tay chân và đầu tạo cảm giác “sống” cho robot thay vì robot hoàn toàn đứng yên. Các hành vi phi ngôn ngữ biểu lộ sự chú ý của robot đối với người tương tác như hướng nhìn của mắt (nhiều lúc kết hợp với đầu và toàn thân) tạo cảm giác robot hiểu những gì đang xảy ra xung quanh. Các hành vi của lớp này hoạt động liên tục ngay cả khi hành vi của các lớp khác đang thực hiện.
Lớp hành vi có chủ ý
Lớp này bao gồm các hành vi ngôn ngữ (cử chỉ và lời nói) và phi ngôn ngữ (cử chỉ) có chủ đích của robot nhằm thực hiện nhiệm vụ được giao. Cử chỉ và lời nói phải được đồng bộ với nhau để tránh tình trạng “hình tiếng không khớp”. Đối với một hành động cụ thể nào đó, con người thường thể hiện ra ngoài khác nhau tuỳ theo người đối diện, cảm xúc, thời gian, địa điểm. v.v.. Ví dụ: Hành động chào sẽ được biến đổi một chút nếu người đối diện lớn tuổi hoặc nhỏ tuổi hơn mình; hành động vẫy tay lúc vui và lúc buồn sẽ khác nhau.

Lớp hành vi phản chiếu suy nghĩ
Đây là lớp hành vi cao nhất trong đó robot tự đánh giá hành vi có chủ ý của mình trước khi thực hiện. Các quy luật xã hội và đạo đức sẽ được xem xét trước khi thực hiện hành động. Ví dụ: robot trong giáo dục sẽ gặp trường hợp thông báo điểm cho học sinh sau khi kết thúc bài kiểm tra. Nếu việc thông báo kết quả kém ngay lập tức đối với một học sinh có thể gây cảm giác buồn chán, robot có thể chọn thông báo bằng một cách khác hoặc một thời điểm khác. Lớp hành vi này phức tạp và thường được kết hợp với lớp hành vi chủ đích hoặc thậm chí bị bỏ qua khi thiết kế.
Kết luận
Thiết kế robot hoạt động trong môi trường tương tác với con người đòi hỏi sự tham gia của nhiều lĩnh vực. Việc áp dụng các kiến thức của các ngành khoa học khác ngoài ngành kỹ thuật là cực kỳ quan trọng trong việc thiết kế hình dáng và hành vi cho robot.
Tài liệu tham khảo
[1]C. Bartneck, T. Belpaeme, F. Eyssel, T. Kanda, M. Keijsers, and S. Šabanović, Human-Robot Interaction: An Introduction. Cambridge University Press, 2020.
[2]H.-L. Cao et al., “A Personalized and Platform-Independent Behavior Control System for Social Robots in Therapy: Development and Applications,” IEEE Transactions on Cognitive and Developmental Systems, vol. 11, no. 3, pp. 334–346, 2018.