Unit 6 Actuators
Actuators are the “muscles” of a robot, the parts which convert stored energy into movement. By far the most popular actuators are electric motors that rotate a wheel or gear, and linear actuators that control industrial robots in factories. There are some recent advances in alternative types of actuators, powered by electricity, chemicals, or compressed air.
Source: Adapted from the Wikipedia article “Robotics” (Wikipedia contributors 2021e), which is released under the Creative Commons Attribution-Share-Alike License 3.0.
6.1 Reading: Robot Actuators
An actuator is an electromechanical device that converts energy into mechanical work or motion. For robots, actuators are like muscles that perform work. The work can be either to induce motion or to object motion. That is either to start a movement or to stop it. There are different types of actuators available and most of them either create rotational motion or linear motion.
Linear actuator creates linear motion. It creates to and fro motion (forward and backward). These actuators can be driven by either linear or rotational motion.
To simplify things, let us take an example of a bicycle. When the cyclist pushes the pedal, it rotates the bottom bracket in a cycle which is connected to a roller chain. Now the rotational motion from the bracket creates a linear motion in the roller chain.
Rotational actuator induces rotary or rotational motion. A simple DC motor is an example of a rotational actuator. Similar to a linear actuator, rotation actuators can be driven by either linear motion or rotational motion.
Let us continue with our bicycle example to understand how linear motion can be used to create rotary motion. The roller chain in a bicycle is connected to the sprocket gear of the driving wheel. When a cyclist pedals, the roller chain (remember that roller chain is an example of linear motion) rotates the sprocket gear creating a rotational motion that further rotates the wheel.
Most actuators can be mechanically designed to induce rotary motion or linear motion. A simple nut attached to a linear member can create a rotary motion. On the other hand, attaching a screw to a rotary actuator creates linear motion.
The below animations shows both linear motion and rotary motion. The bottom bracket rotates creating a linear motion in the roller chain. Further, the same linear motion of the chain creates rotary motion in sprocket gear.
Actuators require energy to create motion and the source of energy is usually electric current, pneumatic pressure, or hydraulic fluid.
Source: Adapted from the article “Actuators” (robotplatform.com 2021a).
- What are the main types of actuators?
Show/Hide solution
linear and rotational- What is “to and fro” motion?
Show/Hide solution
forward and backward- Is a DC motor a linear actuator?
Show/Hide solution
No, it is a rotational actuator.6.2 Writing: Festo – BionicCobot
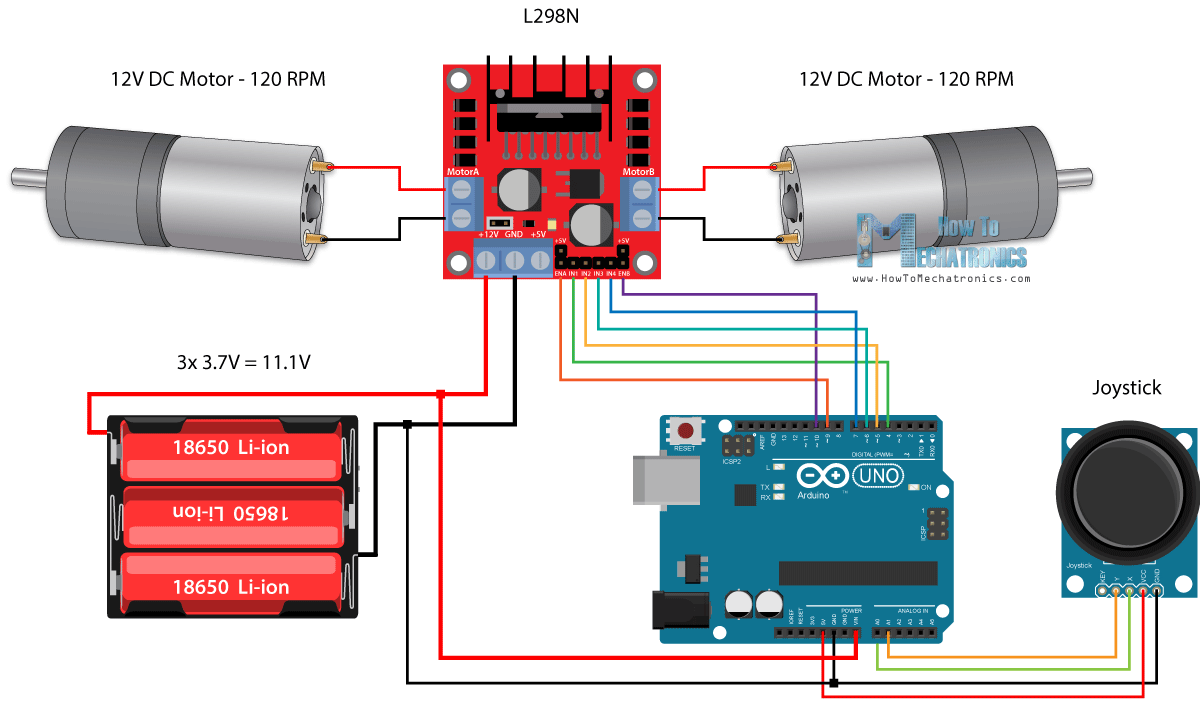
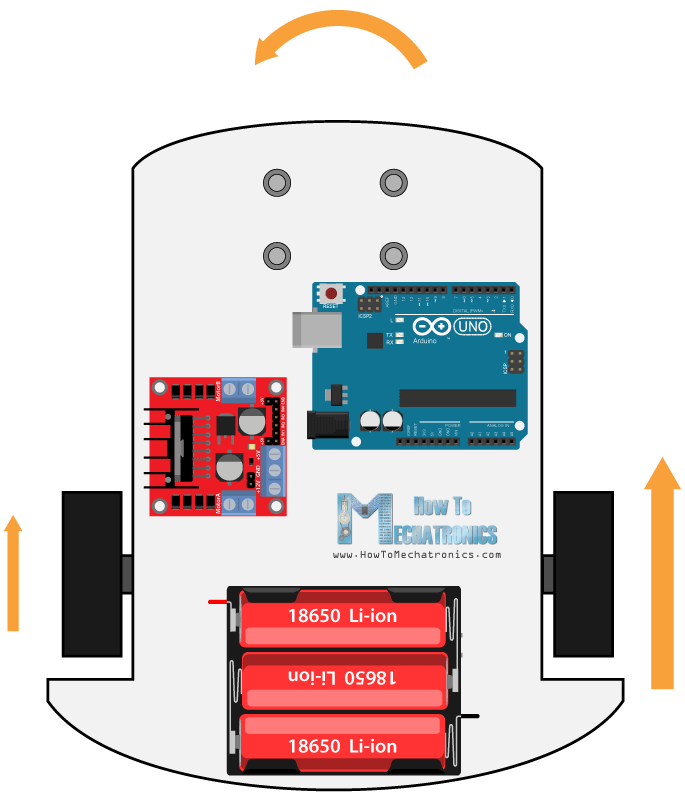
6.3 Speaking: Arduino DC Motor Control
![]()
6.4 Listening: Modular Desktop Collaborative Robotic Arm
In particle physics, gluon is the elementary particle for
So what is the INNFOS robotic arm GLUEON?
GLUON is a completely new INNFOS educational six-axis robotic arm that’s based on the INNFOS SCA technology and can be easily assembled.
What is INNFOS SCA?
SCA is a Smart
It integrates high-performance servo drive, servo motor, high-precision
But it is only
The six joints of the info
Based on infos SCA technology, GLUON has a variety of functions including low resistance torque control, gravity compensation, impact resistance,
Show/Hide solution
transmitting; Compliant; encoder; one-tenth; six axis; collision detection; interaction6.5 My Glossary
Translate these terms into your language.